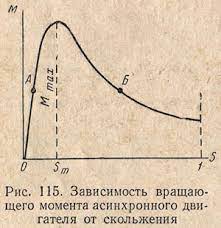
Спершу треба для себе з'ясувати, як тримати оптимальну частоту ковзання, бо щоб її тримати треба знати з якої сторони горба ви знаходитесь , в точці А, чи в точці Б.
Додаткові файли:
 Без названия (10).jpg [ 8.63 КБ | Переглядів: 2391 ]
Без названия (10).jpg [ 8.63 КБ | Переглядів: 2391 ]
І що для цого потрібно (датчик моменту або обертів, або обидва, чи заміна їх на віртуальні контури обертів та моменту). Бо ніякі теревені про різницю скаляр-вектор не дасть відповіді від чого відштовхуватись в розрахунках. Вектор без датчику розраховує частоту ковзання сам постійним балансуванням на горбі міняючи частоту і дивлячісь на струм(тримає вектор),
як це робить наприклад сонячний контролер заряду балансуючі на горбі потужності тримаючі оптімум між струмом і напругою. Як що буде прорахунок, то буде завал в праву частину горбу (перекидання). Скаляр не має зворотнього контуру (реального чі віртуального) регулювання частоти ковзання (щоб балансуати на горбі моменту), тому він завжди лише десь поряд з горбом, і при зміні режуму нагрузки може запросто злетіти з горба не зрозумівши цого. Та і бездатчиковий вектор теж злетить як що не вірно задати характеристики двигуна в налаштуваннях.