Ток писав(ла):
Контроллер скалярный как я писал, энкодера нет, он нафиг не нужен, синусоидальный режим организован по оригинальному решению.
хм... чет я себе мало представляю, как оно работать будет без энкодера)) это ведь не токарный станок, это транспорт!

Давите вы газ у упор, и на стоячий мотор подается максимальная мощность одновременно с максимальной частотой вращения поля? Да вы себе представляете, какие это перегрузки контроллера и двигателя будут? А вращающий момент мизерный. Другое дело, если по энкодеру считается скольжение и задается частота вращения поля, а "газом" прибавляете мощность (эквивалентное напряжение через ШИМ). и тот самый "мизерный" момент можно получить на стоячем моторе, вращая поле только по скольжению и давая такой же мизерный ток. И разница в эффективности может быть в несколько десятков раз.
Другой момент, двигатель работает без нагрузки, и придется гонять большой ток только для поддержания оборотов. Хотя для поддержания тех же оборотов может быть достаточно в 5 раз меньшего "напряжения", зачем лишний раз греть обмотку?
В третих, без енкодера рекуперацию можно получить только реактивкой - конденсаторами. А это низкий КПД из за больших реактивных токов. А читая данные с энкодера можно сделать отрицательное скольжение получать регенерацию в широком диапазоне оборотов.
Тут ребята с векторным Куртисом ломают себе головы, как получить больше эффективность, а вы в скаляре хотите получить "всего на 10% хуже КПД".
Но, особо спорить не хочу. Вы же не Ракарский. Возьмете, да и сделаете. А тогда будем посмотреть, что из этого вышло )
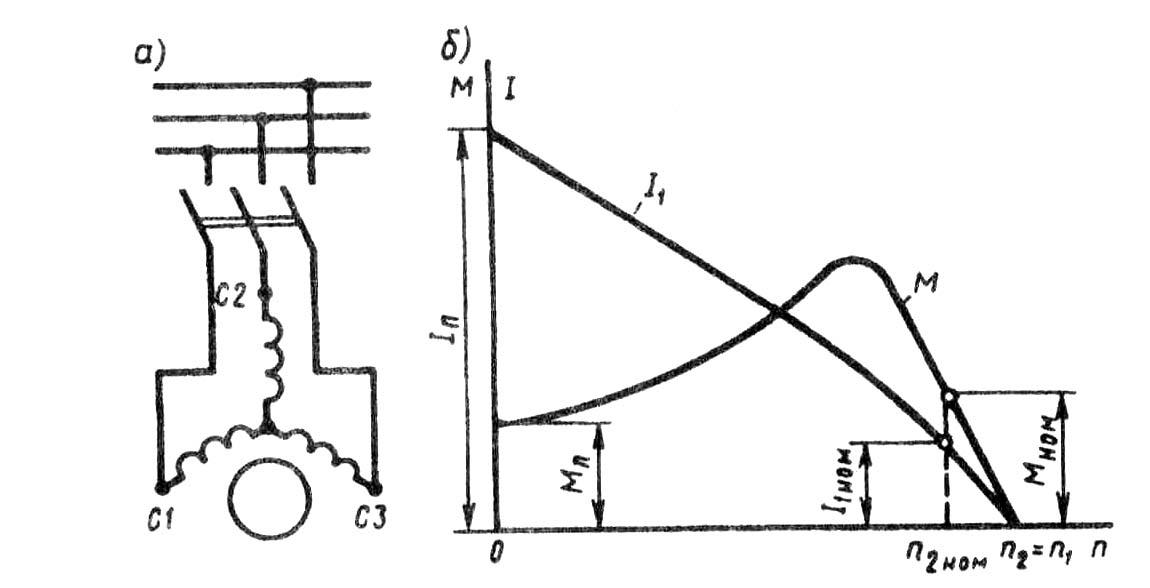
взгляните на картинку и сравните, во сколько раз больше пусковой ток и во сколько раз меньше пусковой момент в АД с КЗ ротором, и разделите эти коэфициенты на "номинальный КПД".






 . Для нормальной езды нужно управлять крутящим моментом , причём очень точно и своевременно, а без этого получится комплект для водного транспорта.
. Для нормальной езды нужно управлять крутящим моментом , причём очень точно и своевременно, а без этого получится комплект для водного транспорта.